7 軸すべてに対して社内で設計された業界をリードするトルク センサーのおかげで、接触力に非常に敏感です。 その優れた分解能、精度、再現性により、環境の動的なセンシングが可能になり、ほとんどの特殊な力センサーの性能を上回ります。 ロボットは軽い力で接続、挿入、締め付けなどの作業を行うことができます。 継続的かつ正確な力の微調整は、輪郭追従、研磨、研削などの用途にも必要です。
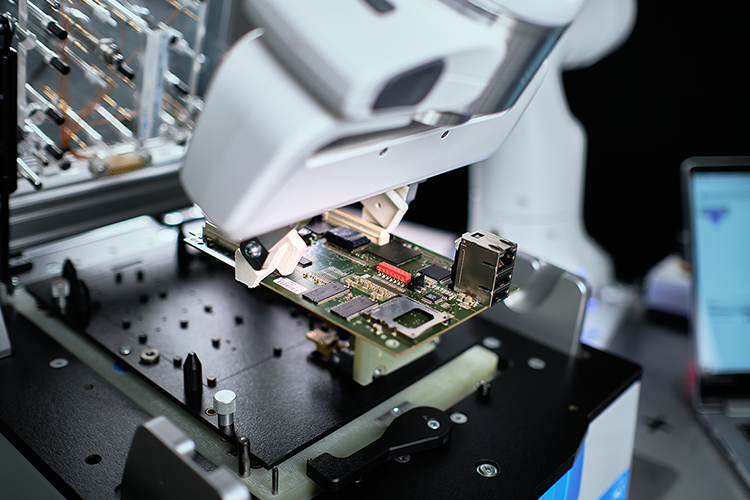
産業グレードの革新的なセンシングと産業グレードの位置制御のエレガントな組み合わせ。 力感知機能に加えて、このロボットは古典的な剛性産業用ロボットの特性を示し、姿勢再現性は +/- 0.1 mm (ISO 9283) mm 未満で、高速でも軌道偏差は無視できます。 これにより、製造プロセスを正確、堅牢かつ迅速に実行できるようになります。

ワークスペース内では、ベースに非常に近いだけでなく、遠く (855 mm) に到達して操作することができ、7 軸の形状により、複雑な姿勢で困難なスペースに到達し、狭い環境でもプロセスを実行できます。
● 軸数 7
●リーチ855mm
●ワークスペースのカバー率 94.5%
●最大エンドエフェクター速度 2m/s
●積載量 3kg

調整可能なガイダンス モードは、重力と摩擦を補償することで知覚重量を最大 60 分の 1 に軽減し、人間と機械の間のよりスムーズでエレガントなインタラクションを保証します。 さらに、操作インターフェイスはロボットアームに便利に配置されており、ユーザーインターフェイスをリモートで制御できます。 さらに、当社の高度なセンサー、制御アルゴリズム、内部モデルにより、予期せぬ衝突をミリ秒以内にタイムリーに検出し、対応することができます。

全7軸のトルクセンサーをはじめ、高分解能位置センサー、ブラシレスDCモーター、ハーモニックギヤ、クロスローラーベアリングなど100種類以上のセンサーを搭載した最高レベルのメカトロニクスを搭載。
●位置エンコーダ分解能:14ビット
●共同電子通信バス: 1 kHz
●モーター: ブラシレス DC モーター
●ハーモニックギヤ:バックラッシゼロ
●クロスローラーベアリング:高剛性
●トルクセンサー分解能:13ビット