
14ビット分解能
絶対位置と関節の冗長性

1kHz
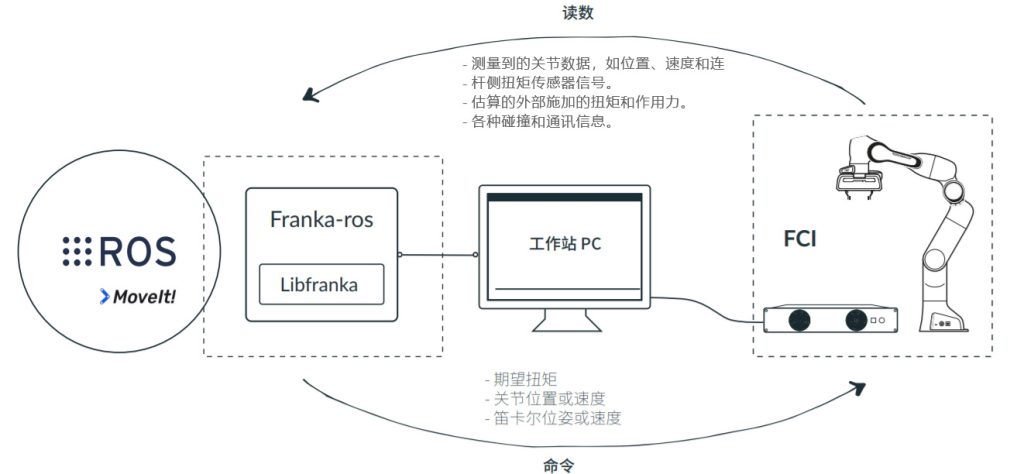
高度に統合された通信バス
高い効率とスピード
全ライフサイクルを通じてメンテナンスフリー
ゼロサイドクリアランス
優れた位置精度と繰り返し精度
高い剛性を備えた軽量設計
ライフサイクルを通して頑丈で耐久性がある
13ビット分解能
優れた精度と高感度

7自由度
高度なメカトロニクスとダイナミックに設計されたワークスペース

定格寿命20,000時間
最適化された熱放散
位置再現性 < +/- 0.1 mm
パス偏差 < +/- 1.25 mm

分解能 < 0.05 N
精度 < 0.8 N
繰り返し精度 < 0.05 N
制御可能な最小力 0.05 N at 1 kHz
誘導力 ~2N
衝突検出時間 < 2 ms
公称衝突反応時間 < 50 ms